



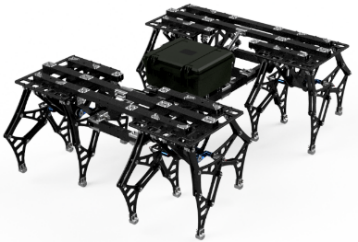




The high-mobility adaptive planetary track probing robot is composed of power modules, chassis drive, planetary track, main track travel and control modules. The robot utilizes the planetary crawler moving approach based on the principle of minimum energy consumption to achieve mechanical system self-adaptation and can ascend continuous steps rapidly without adjustment. It does not necessitate sensors when crossing obstacles, thereby eliminating the robot’s sensing and calculating process, reducing the transition time between flat ground driving and vertical obstacle-crossing state, and markedly enhancing the response speed of obstacle-crossing. It adopts the less-powered machine driving manner to decrease the operating energy consumption, enhance the system reliability and maintainability, and augment the driving range.


The robot is furnished with a micro-camera and a combat unit and, in combination with image recognition algorithms, is capable of automatically conducting unmanned and coordinated combat tasks such as reconnaissance and assault operations, increasing the efficiency and success rate of capture.
With its lightweight, high speed and low cost, the robot is appropriate for being deployed in large quantities to urban battlefields to realize rapid assault operations in clusters.
Core Parameters
| Indicator | Parameters |
|---|---|
| Dimensions | 600×440×220mm |
| Overall Weight/Rated Load | 8kg/2kg |
| Traveling Speed | 8km/h |
| Crossing Height | 230mm |
| Climbing Angle/Continuous Steps | 35° |
| Mileage/Time | 5km/1h |
| Positioning Sensor | GPS/BD Sdual mode |
| Control Mode | remote control(3km) |
| Ammunition Carrying Capacity | 500g |
| Detection Distance | 0.5-30m(autofocus) |
| Camera Resolution | 1080p |